En este post, os explicaremos porque los motores no arman en un dron de carreras, es decir los típicos problemas que suceden cuando le damos al switch de armado y no responde nuestro dron y suena un código en pitidos.
Este tutorial hablamos de cómo solucionar problemas y arreglar un dron que no arma y los problemas típicos que impiden que una placa se active con Betaflight.
Índice
Si eres completamente nuevo, revisa los tutoriales Betaflight que tenemos en la página.
🚀¿Qué comprobar si no arma el dron?
Estas son las primeras cosas que tienes que mirar y comprobar cuando tienes problemas en el armado del dron.

- Comprueba que el receptor de radio está enlazado y funciona correctamente en Betaflight. Verifica en la pestaña del receptor si los canales responden al movimiento de los sticks en el orden y la dirección correctos (descarga el último configurador de betaflight).
- Comprueba si has asignado correctamente el interruptor auxiliar de tu radio para el modo ARM, y si puede activarse mediante ese mismo switch. El modo ARM debe ponerse amarillo cuando está activado, esto indica que funciona el interruptor auxiliar.
- Los programadores de Betaflight instauraron diferentes protocolos de seguridad, uno de ellos es que los motores no girarán si el controlador de vuelo está conectado al configurador. Quita la conexión USB y vuelve a intentarlo.

Si hasta aquí todo está bien pero aún no puedes armar tu dron, entonces tendremos que mirar un poco más a fondo.
🔥¿Cómo comprobar si hay problemas de armado en Betaflight?
Si tienes la opción del OSD de Betaflight, asegúrete de activar «Warnings» en tu pantalla y de que esté seleccionado «Arming Disable». Esto te permitirá ver qué está impidiendo el armado a través del OSD.

Si no tienes el OSD de Betaflight, también puedes verificar el estado del armado en Betaflight.
Hay varias formas de verificar el «Indicador de desactivación de armado«:
- Configurador de Betaflight
- CLI
- Pitido
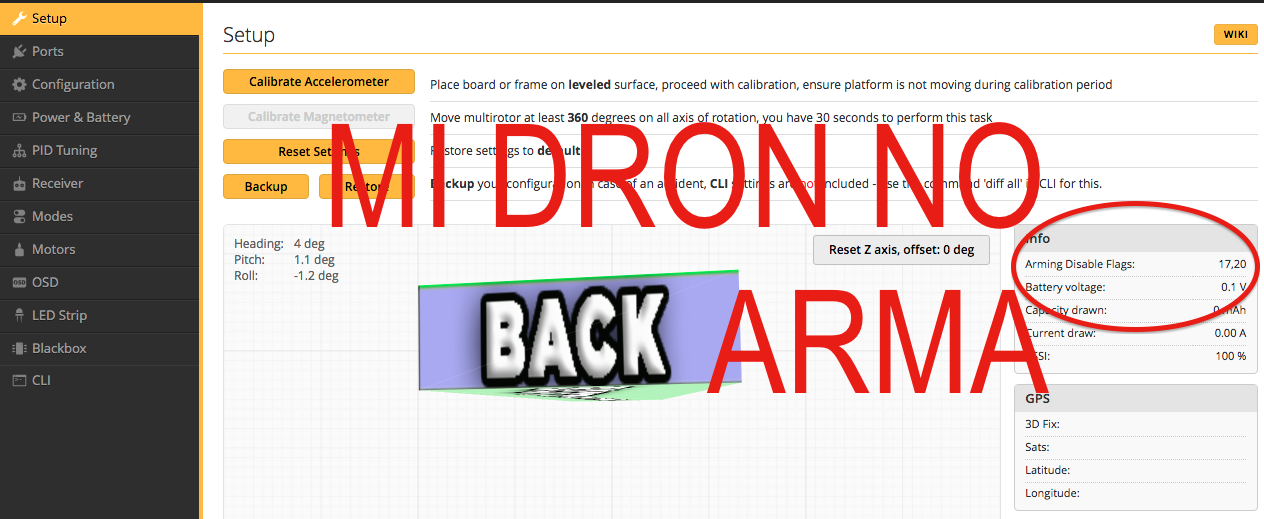
Configurador de Betaflight
Si tienes acceso a un ordenador, en la pestaña de configuración (Setup) en el configurador de Betaflight, puedes comprobar fácilmente el estado del armado mediante un código numérico, el indicador de desactivación de armado (Arming Disable Flags). En la parte de Info.

CLI
Otra forma de comprobarlo es entrando en la CLI introduciendo el comando «status«. La última línea muestra la información de estado del armando y la lista de indicadores activos.
Artículos relacionados: ¿Cómo utilizar CLI en Betaflight?

Numero de pitidos
Si no puedes usar un PC en ese momento, pero has montado tu dron con un beeper, el pitido de inicio también indica los motivos de la deshabilitación del armado. El patrón de pitidos se puede dividir en:
- cinco pitidos cortos para llamar la atención, estos puedes ignorarlos
- una serie de pitidos largos
- una serie de pitidos cortos con largos intervalos
Cada pitido largo representa 5, mientras que cada pitido corto representa 1. El número que representa el patrón se puede calcular como:
5 x el número de pitidos largos + 1 x el número de pitidos cortos.
Por ejemplo:
- 0 pitido largo y 3 pitidos cortos = 3
- 2 pitido largo y 3 pitidos cortos = 13
- 3 pitidos largos + 1 pitidos cortos = 16
Tabla de códigos de no armado en betaflight
Una vez que haya encontrado los números o nombres de las marcas de desactivación de armado, puedes buscarlo en la tabla para ver qué significan realmente. La tabla esta en la página wiki de Betaflight para la conveniencia de nuestros lectores.
| Name | Description | Beep code | Required Actions | ||||
|---|---|---|---|---|---|---|---|
| 3.2 | 3.3 | 3.4/3.5 | 4.0 | 4.1+ | |||
NOGYRO |
A gyro was not detected | 1 | 1 | 1 | 1 | 1 | You may have a hardware failure, if a previous firmware version works then it may be a firmware issue. |
FAILSAFE |
Failsafe is active | 2 | 2 | 2 | 2 | 2 | Rectify the failure condition and try again. |
RXLOSS(1)
|
No valid receiver signal is detected | 3 | 3 | 3 | 3 | 3 | Your receiver is either faulty or has no link to the transmitter. |
BADRX(1)
|
Your receiver has just recovered from receiver failsafe but the arm switch is on | 4 | 4 | 4 | 4 | 4 | Switch the arm switch off. |
BOXFAILSAFE |
The ‘FAILSAFE’ switch was activated | 5 | 5 | 5 | 5 | 5 | See FAILSAFE
|
RUNAWAY |
Runway Takeoff Prevention has been triggered | 6 | 6 | 6 | 6 | Disarm to clear this condition. | |
THROTTLE |
Throttle channel is too high | 6 | 7 | 7 | 7 | 7 | Lower throttle below min_check. |
ANGLE |
Craft is not level (enough) | 7 | 8 | 8 | 8 | 8 | Level craft to within small_angle degrees (default 25). |
BOOTGRACE |
Arming too soon after power on | 8 | 9 | 9 | 9 | 9 | Wait until pwr_on_arm_grace seconds (default 5) have elapsed. |
NOPREARM |
Prearm switch is not activated or prearm has not been toggled after disarm | 9 | 10 | 10 | 10 | 10 | Toggle the prearm switch. |
LOAD |
System load is too high for safe flight | 10 | 11 | 11 | 11 | 11 | Revisit configuration and disable features. |
CALIB |
Sensor calibration is still ongoing | 11 | 12 | 12 | 12 | 12 | Wait for sensor calibration to complete. |
CLI |
CLI is active | 12 | 13 | 13 | 13 | 13 | Exit the CLI. |
CMS |
CMS (config menu) is Active – over OSD or other display | 13 | 14 | 14 | 14 | 14 | Exit the CMS (or OSD menu). |
OSD |
OSD menu is active | 14 | 15 | 15 | Exit OSD menu. | ||
BST |
A Black Sheep Telemetry device (TBS Core Pro for example) disarmed and is preventing arming | 15 | 16 | 16 | 15 | 15 | Refer to the manual for your hardware. |
MSP |
MSP connection is active, probably via Betaflight Configurator | 16 | 17 | 17 | 16 | 16 | Terminate the Betaflight Configurator connection (disconnect). |
PARALYZE |
Paralyze mode has been activated | 18 | 17 | 17 | Power cycle/reset FC board. | ||
GPS |
GPS rescue mode is configured but required number of satellites has not been fixed | 19 | 18 | 18 | Wait for GPS fix or disable GPS rescue mode. | ||
RESCUE_SW |
GPS Rescue switch is in an unsafe position | 19 | 19 | Turn off the GPS Rescue switch to arm. | |||
RPMFILTER(2)
|
Motor RPM-based filtering is not functioning | 20 | 20 | One or more ESC’s are not supplying valid RPM telemetry. | |||
REBOOT_REQD |
Reboot required | 21 | Reboot the flight controller for settings changes to take effect. | ||||
ARMSWITCH |
Arm switch is in an unsafe position | 17 | 18 | 20 | 21 | 22 | Toggle the arm switch to arm. |
☝Otros problemas comunes que evitan que el dron se active.
Si no obtienes ningún indicador de armado deshabilitado en Betaflight, entonces el problema podría ser otra cosa. Trata de ir a chequeando la siguiente lista de verificación, ya que el problema podría estar relacionado con otras cosas.
Relacionado con el Acelerometro
Tal vez tu dron no esté en una superficie lo suficientemente nivelada, o el ACC (acelerómetro) no esté calibrado. Primero calibra el ACC en una superficie nivelada y plana, si aún no tienes suerte, intente aumentar los “grados de ángulo pequeño” (el valor predeterminado es 25). Desde B3.4 accesible por GUI.
O simplemente deshabilita el acelerómetro si no vuelas el modo de angle.
Uso de CPU de Betafligh demasiado alto
Cuando la carga de la CPU es demasiado alta, el controlador de vuelo simplemente se negará a armarse. Intenta mantenela por debajo del 50% reduciendo el tiempo de bucle y deshabilitando funciones innecesarias.

Acelerador relacionado
Verifique si el valor más bajo en su canal del acelerador es demasiado alto, asegúrese de que la palanca del acelerador esté en su posición más baja cuando intente armar. Hace mucho tiempo no me armaba porque nunca estaba en el mínimo por una mala calibración del throttle.
Lo ideal es que todos los canales, incluido el acelerador, tengan puntos finales de 1000 y 2000. Si no lo son, es posible que tengas que calibrar primero los puntos finales de tu emisora.
Betaflight no se arma si el acelerador mínimo es demasiado alto (más alto que el ajuste «Min_Check»). Esta es una característica de seguridad para que el drone no gire repentinamente los motores y te haga daño cuando está armado.
Debes asegurarte de que tu aceleración sea más baja que min_check cuando la posición de la palanca este en la posición más baja. Min_check se establece en 1050 de forma predeterminada, verifique dos veces si no se ha cambiado por error.
Umbral de ruido en Gyro
Algunas controladoras de vuelo con gyro a 32KHz, como la F4 Pro Corner pueden tener giroscopios más sensibles y el dron se negaría a inicializarse después del encendido, y por lo tanto no se puede armar.
Al aumentar el umbral de calibración del gyro en la CLI, se puede reducir la sensibilidad durante la inicialización. Intenta configurarlo en 100 o incluso 120, mediante el comando, gyro_calib_noise_limit.
Conclusión
Espero que haya sido útil! Avíseme con un comentario si tuviste algún problema con el armado causado por otra cosa que no se trató en este tutorial. Si aún tiene problemas para armar tu dron después de seguir esta guía, pública tu pregunta, la comunidad puede ser más poderosa.










Hola yo tengo un problema de armado pero lo curioso es que solo me ocurre con una de mis lipos. Tengo dos iguales y otra diferente, y el dron bo se arma con una de las dos que son iguales.
Un saludo!
Hola Raul,
Pues la verdad lo que comentas es muy raro. Entiendo que con la LiPo que no arma enciende todo, FC, VTX y PDB, si no es así claramente el problema lo tiene la batería.
Dejamos el coment en abierto haber si alguien se le ocurre algo.
Un saludo
Hola buenas a mi me sigue sin armar el dron es un uruav64 con una taranis x9d plus, programo el botón de armado, tanto en imputo como en mixer,pero cuando me pongo en betaflight no se activa dicha entrada, varios los rangos pero me sigue igual AUX1
Sabes que puede ser,he realizado los pasos que pones.
En info me pone MSP, por que estoy con betafly
Interruptor sf, apagado 1000
Interruptor sf, encendido 2000.
Sabes que le puede ocurrir.estoy perdido. Gracias por su colaboración
Hola José,
Por lo que entiendo si que tienes recepción en la placa, FC, verdad?
Si es asi, puedes reasignar el armado a otro canal que si te funcione y dándole el valor de encendido a 1500.
Tienes que ver ne betaflight que se mueve la barra de estado de recepción de ese canal, piensa también que mientras estés conectado al PC este nunca se armara.
Ahora mismo no se me ocurre nada mas que pueda pasarle, estate seguro de la configuración del transmisor es correcta, Sbus o el que sea en tu caso,.
Un saludo y gracias!!!
Hola droneros,
Me estoy comiendo el coco con un problema de armado, esta es la situacion:
Todo funciona con mi F3 EVO brushed 1S menos el armado, en ajustes indica Bandera 17 (MSP), no arma desenchufado o enchufado a BF.
Me he mirado muchos videos y ya no se que tocar…
Canales de la emisora responden bien, motores giran si los activo con BF, pero no arma …
Hola Carlos,
Es realmente extraño, has mirado en la parte de recepción que se muevan todas las barras? Si es así y no arma mira el gas mínimo necesario a partir del armado.
Si te da que el 17 esta activo es la comunicación, prueba una cosa, ves a la pestaña de motores, activa eso de entiendo los riesgos para poder activarlo desde ahí, una vez hecho esto prueba de activarlo desde el transmisor. No se me ocurre nada mas, haber si la comunidad tiene alguna idea.
hola tengo un problema de armad.
me aparece fallo n 16,21
ademas cuando intento conectar con blh solo me detecta los motores da error de esc. uso una placa 4en 1 y una omnibus f4. Gracias
Hola Manu,
Cuando dices que cuando conectas a blh solo detecta los motores, son los esc a lo que te refieres, verdad, prueba desde betaflight en la pestaña motores y sin hélices intenta encenderlos uno a uno.
Si es dshot no cal calibrar, pero si no consigues acceder desde blh … raro rao.
Los errores que mencionas son, 16 probable que lo tengas conectado por usb, y el 21 que tienes algún siwtch o stick en posición no segura.
Un saludo
Hola. La cosa es que ayer me volaba Bien, hoy lo he abierto para cambiar la lente FPV y ahora ya no arma. Da un pitido largo (piribibiii…… Piiiiiiiiiiiiiiiiiii) y desconecto la batería.
Que puede ser??
Hola Arnaitz;
Puedes probar de conectarla en betaflight haber si te conecta bien, porque parece que no acaba de comprobar el check de los ESCs. Si te conecta, prueba los motores del dron uno a uno desde el apartado de motores, quita las helices!!!
Si después de esto persiste el problema… pinta mal, puede ser un problema de la controladora de vuelo.
Un saludo!!!
hola consulta como desactivo la opción ANGLE PARALIZE no me deja armar
saludos
Esa es una función betaflight utilizada para las carreras. Verifica tu configuración de BF. Asegúrate de no tener habilitado un modo para Paralizar en caso de accidente.
hola tengo en mi dron instalado clracing f7 con 4 en 1,rx crossfire y vtx unify,el problema es al armar y acelerar el dron despega agresivamente girando de yaw,version beta 4.0.4,e revisado giro de los motores y enlasado con la emisora desde betaflight,todo correcto y sigo con este problema,agradeceria cualquier ayuda,saludos
Intenta activar el black box, así podrás saber que esta ocurriendo en ese momento, y que es lo que esta fallando.
Hola. No puedo armar motores y en mis gafas aparece el mensaje «rx loss». El receptor está bindeado correctamente y en betaflight se mueven las barras de los canales cuando acciono sus controles. He probado con 2 receptores y hace lo mismo. Alguna idea de lo que puede suceder?
Hola Pablo,
Que Receptor es? Por estaría bien saberlo para poder acotejarse mejor, y si hay temas como half duplex activado o no etc etc.
En la lista de flags para el armado dice que es problema del receptor, pero claro si ya lo has cambiado entiendo que no lo es.
La verdad es muy raro, has probado ha cambiar firmware de betaflight? Podemos esperar haber si alguien sabe que esta pasando.
Un saludo
Amigo encontraste la solución?? Me pasa lo mismo T.T
Hola a todos, de un día para otro mi drone dejo de armar, recive la señal la placa controladora cuando acciono el botón de armado pero este no realiza nada, esta todo bindeado, no ha tenido golpes ni he desarmado, simplemente dejo de armar. F4 flame, que podrá ser?
Hola,
Mira la configuración de beta, que no tengas algún seguro activado, también puede ser que detecte que algún cable de esc este mal y por eso no arme.
Un saludo
Hola, soy novato, estoy armando mi drone por primera vez, ya he quemado dos placas y aun no haga mi primer vuelo, hoy termine de armar mi drone, conecte a betaflight para actualizar la placa y ahi todo bien, toque algunas configuraciones según un video que ha en YT y luego conecte la bateria para mirar lo motores y ahi veo que la placa no hace el sonido al final que siempre hace, solo suena los motores, lo que si veo es que se conectar al beta 🙁 ¿que puede ser?
Hola,
Por lo que explicas parece ser la conexión de los variadores con la controladora, esos últimos pitidos hacen referencia a la comunicación FC con variadores.
Un saludo
Holaa !
Me estoy volviendo loco al intentar que mi dron arme pero no consigo saber el porque , he seguido todos los pasos para chequear pero el dron sigue sin armar …
En el configurador bLheli me sale q los lee pero no me aparecen los tipicos menus para flashear , se queda pitando como loco …
hola buenas tengo problemas con el acelerometro
conecto mi dron a la pc abro betaflight apreto el boton de calibrar acelerometro
y nada o se vuelve loco no he podido armar por lo mismo creo
alguien que pueda ayudar ? 🙂 gracias
El interruptor del brazo está en una posición insegura arm_switch me sale esto en betaflight no me deja armar el dron por esto no se que es alguien me ayuda gracias